Rainbow#
import xarray as xr
from open_radar_data import DATASETS
import xradar as xd
Download#
Fetching Rainbow radar data file from open-radar-data repository.
filename = DATASETS.fetch("2013051000000600dBZ.vol")
Downloading file '2013051000000600dBZ.vol' from 'https://github.com/openradar/open-radar-data/raw/main/data/2013051000000600dBZ.vol' to '/home/docs/.cache/open-radar-data'.
xr.open_dataset#
Making use of the xarray rainbow backend. We also need to provide the group. Note, that we are using CfRadial2 group access pattern.
ds = xr.open_dataset(filename, group="sweep_0", engine="rainbow")
display(ds)
<xarray.Dataset> Size: 1MB
Dimensions: (azimuth: 361, range: 400)
Coordinates:
* azimuth (azimuth) float64 3kB 0.5055 1.549 2.505 ... 358.5 359.5
elevation (azimuth) float64 3kB ...
time (azimuth) datetime64[ns] 3kB ...
* range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
longitude float64 8B ...
latitude float64 8B ...
altitude float64 8B ...
Data variables:
DBZH (azimuth, range) float64 1MB ...
sweep_mode <U20 80B ...
sweep_number int64 8B ...
prt_mode <U7 28B ...
follow_mode <U7 28B ...
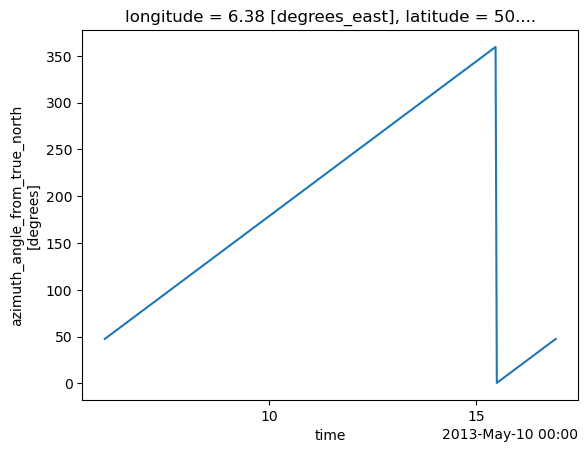
sweep_fixed_angle float64 8B ...Plot Time vs. Azimuth#
We need to sort by time and specify the coordinate.
ds.azimuth.sortby("time").plot(x="time")
[<matplotlib.lines.Line2D at 0x75ed067ca850>]
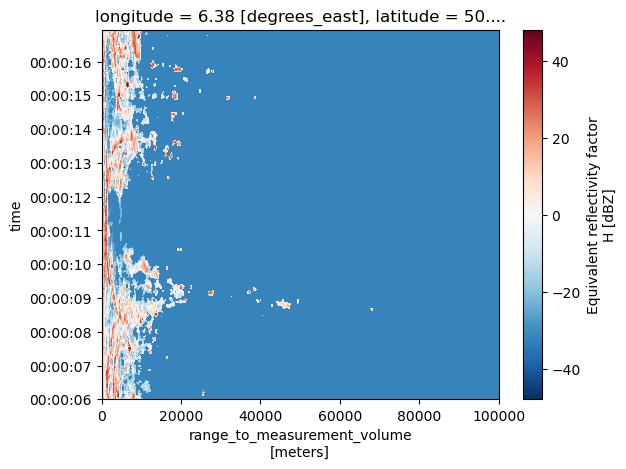
Plot Range vs. Time#
We need to sort by time and specify the coordinate.
ds.DBZH.sortby("time").plot(y="time")
<matplotlib.collections.QuadMesh at 0x75ed066927b0>
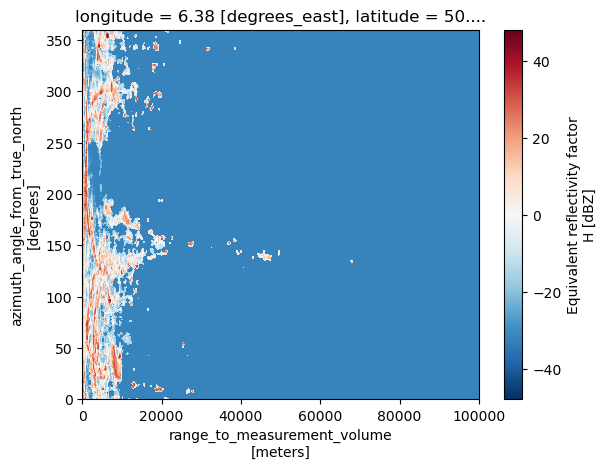
Plot Range vs. Azimuth#
ds.DBZH.plot()
<matplotlib.collections.QuadMesh at 0x75ed065c2490>
backend_kwargs#
Beside first_dim there are several additional backend_kwargs for the rainbow backend, which handle different aspects of angle alignment. This comes into play, when azimuth and/or elevation arrays are not evenly spacend and other issues.
help(xd.io.RainbowBackendEntrypoint)
Help on class RainbowBackendEntrypoint in module xradar.io.backends.rainbow:
class RainbowBackendEntrypoint(xarray.backends.common.BackendEntrypoint)
| Xarray BackendEntrypoint for Rainbow5 data.
|
| Method resolution order:
| RainbowBackendEntrypoint
| xarray.backends.common.BackendEntrypoint
| builtins.object
|
| Methods defined here:
|
| open_dataset(
| self,
| filename_or_obj,
| *,
| mask_and_scale=True,
| decode_times=True,
| concat_characters=True,
| decode_coords=True,
| drop_variables=None,
| use_cftime=None,
| decode_timedelta=None,
| group=None,
| reindex_angle=False,
| first_dim='auto',
| site_as_coords=True
| )
| Backend open_dataset method used by Xarray in :py:func:`~xarray.open_dataset`.
|
| ----------------------------------------------------------------------
| Data and other attributes defined here:
|
| __annotations__ = {}
|
| description = 'Open Rainbow5 files in Xarray'
|
| open_dataset_parameters = ('filename_or_obj', 'mask_and_scale', 'decod...
|
| url = 'https://xradar.rtfd.io/latest/io.html#rainbow-data-i-o'
|
| ----------------------------------------------------------------------
| Methods inherited from xarray.backends.common.BackendEntrypoint:
|
| __repr__(self) -> 'str'
| Return repr(self).
|
| guess_can_open(self, filename_or_obj: 'T_PathFileOrDataStore') -> 'bool'
| Backend open_dataset method used by Xarray in :py:func:`~xarray.open_dataset`.
|
| open_datatree(
| self,
| filename_or_obj: 'T_PathFileOrDataStore',
| *,
| drop_variables: 'str | Iterable[str] | None' = None
| ) -> 'DataTree'
| Backend open_datatree method used by Xarray in :py:func:`~xarray.open_datatree`.
|
| If implemented, set the class variable supports_groups to True.
|
| open_groups_as_dict(
| self,
| filename_or_obj: 'T_PathFileOrDataStore',
| *,
| drop_variables: 'str | Iterable[str] | None' = None
| ) -> 'dict[str, Dataset]'
| Opens a dictionary mapping from group names to Datasets.
|
| Called by :py:func:`~xarray.open_groups`.
| This function exists to provide a universal way to open all groups in a file,
| before applying any additional consistency checks or requirements necessary
| to create a `DataTree` object (typically done using :py:meth:`~xarray.DataTree.from_dict`).
|
| If implemented, set the class variable supports_groups to True.
|
| ----------------------------------------------------------------------
| Data descriptors inherited from xarray.backends.common.BackendEntrypoint:
|
| __dict__
| dictionary for instance variables
|
| __weakref__
| list of weak references to the object
|
| ----------------------------------------------------------------------
| Data and other attributes inherited from xarray.backends.common.BackendEntrypoint:
|
| supports_groups = False
ds = xr.open_dataset(filename, group="sweep_1", engine="rainbow", first_dim="time")
display(ds)
<xarray.Dataset> Size: 1MB
Dimensions: (time: 361, range: 400)
Coordinates:
* time (time) datetime64[ns] 3kB 2013-05-10T00:00:19.01515150...
azimuth (time) float64 3kB ...
elevation (time) float64 3kB ...
* range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
longitude float64 8B ...
latitude float64 8B ...
altitude float64 8B ...
Data variables:
DBZH (time, range) float64 1MB ...
sweep_mode <U20 80B ...
sweep_number int64 8B ...
prt_mode <U7 28B ...
follow_mode <U7 28B ...
sweep_fixed_angle float64 8B ...open_odim_datatree#
The same works analoguous with the datatree loader. But additionally we can provide a sweep string, number or list.
help(xd.io.open_rainbow_datatree)
Help on function open_rainbow_datatree in module xradar.io.backends.rainbow:
open_rainbow_datatree(filename_or_obj, **kwargs)
Open ODIM_H5 dataset as :py:class:`xarray.DataTree`.
Parameters
----------
filename_or_obj : str, Path, file-like or DataStore
Strings and Path objects are interpreted as a path to a local or remote
radar file
Keyword Arguments
-----------------
sweep : int, list of int, optional
Sweep number(s) to extract, default to first sweep. If None, all sweeps are
extracted into a list.
first_dim : str
Can be ``time`` or ``auto`` first dimension. If set to ``auto``,
first dimension will be either ``azimuth`` or ``elevation`` depending on
type of sweep. Defaults to ``auto``.
reindex_angle : bool or dict
Defaults to False, no reindexing. Given dict should contain the kwargs to
reindex_angle. Only invoked if `decode_coord=True`.
fix_second_angle : bool
If True, fixes erroneous second angle data. Defaults to ``False``.
site_as_coords : bool
Attach radar site-coordinates to Dataset, defaults to ``True``.
kwargs : dict
Additional kwargs are fed to :py:func:`xarray.open_dataset`.
Returns
-------
dtree: xarray.DataTree
DataTree
dtree = xd.io.open_rainbow_datatree(filename, sweep="sweep_8")
display(dtree)
<xarray.DataTree>
Group: /
│ Dimensions: (sweep: 1)
│ Coordinates:
│ latitude float64 8B ...
│ longitude float64 8B ...
│ altitude float64 8B ...
│ Dimensions without coordinates: sweep
│ Data variables:
│ volume_number int64 8B 0
│ platform_type <U5 20B 'fixed'
│ instrument_type <U5 20B 'radar'
│ time_coverage_start <U20 80B '2013-05-10T00:01:55Z'
│ time_coverage_end <U20 80B '2013-05-10T00:02:05Z'
│ sweep_group_name (sweep) int64 8B 8
│ sweep_fixed_angle (sweep) float64 8B 12.2
│ Attributes:
│ Conventions: None
│ instrument_name: None
│ version: None
│ title: None
│ institution: None
│ references: None
│ source: None
│ history: None
│ comment: im/exported using xradar
└── Group: /sweep_0
Dimensions: (azimuth: 361, range: 400)
Coordinates:
* azimuth (azimuth) float64 3kB 0.5 1.544 2.51 ... 358.5 359.5
elevation (azimuth) float64 3kB ...
time (azimuth) datetime64[ns] 3kB 2013-05-10T00:02:03.10606...
* range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
Data variables:
DBZH (azimuth, range) float64 1MB ...
sweep_mode <U20 80B ...
sweep_number int64 8B ...
prt_mode <U7 28B ...
follow_mode <U7 28B ...
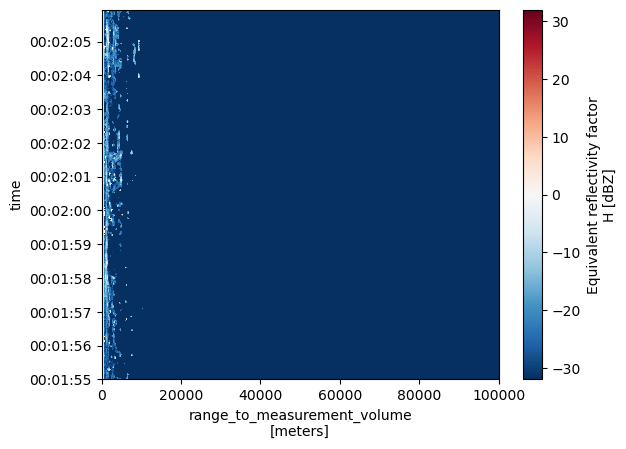
sweep_fixed_angle float64 8B ...Plot Sweep Range vs. Time#
dtree["sweep_0"].ds.DBZH.sortby("time").plot(y="time")
<matplotlib.collections.QuadMesh at 0x75ecfc9b6c10>
Plot Sweep Range vs. Azimuth#
dtree["sweep_0"].ds.DBZH.plot()
<matplotlib.collections.QuadMesh at 0x75ecfc8ac550>
dtree = xd.io.open_rainbow_datatree(filename, sweep="sweep_8")
display(dtree)
<xarray.DataTree>
Group: /
│ Dimensions: (sweep: 1)
│ Coordinates:
│ latitude float64 8B ...
│ longitude float64 8B ...
│ altitude float64 8B ...
│ Dimensions without coordinates: sweep
│ Data variables:
│ volume_number int64 8B 0
│ platform_type <U5 20B 'fixed'
│ instrument_type <U5 20B 'radar'
│ time_coverage_start <U20 80B '2013-05-10T00:01:55Z'
│ time_coverage_end <U20 80B '2013-05-10T00:02:05Z'
│ sweep_group_name (sweep) int64 8B 8
│ sweep_fixed_angle (sweep) float64 8B 12.2
│ Attributes:
│ Conventions: None
│ instrument_name: None
│ version: None
│ title: None
│ institution: None
│ references: None
│ source: None
│ history: None
│ comment: im/exported using xradar
└── Group: /sweep_0
Dimensions: (azimuth: 361, range: 400)
Coordinates:
* azimuth (azimuth) float64 3kB 0.5 1.544 2.51 ... 358.5 359.5
elevation (azimuth) float64 3kB ...
time (azimuth) datetime64[ns] 3kB 2013-05-10T00:02:03.10606...
* range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
Data variables:
DBZH (azimuth, range) float64 1MB ...
sweep_mode <U20 80B ...
sweep_number int64 8B ...
prt_mode <U7 28B ...
follow_mode <U7 28B ...
sweep_fixed_angle float64 8B ...dtree = xd.io.open_rainbow_datatree(filename, sweep=[0, 1, 8])
display(dtree)
<xarray.DataTree>
Group: /
│ Dimensions: (sweep: 3)
│ Coordinates:
│ latitude float64 8B ...
│ longitude float64 8B ...
│ altitude float64 8B ...
│ Dimensions without coordinates: sweep
│ Data variables:
│ volume_number int64 8B 0
│ platform_type <U5 20B 'fixed'
│ instrument_type <U5 20B 'radar'
│ time_coverage_start <U20 80B '2013-05-10T00:00:19Z'
│ time_coverage_end <U20 80B '2013-05-10T00:02:19Z'
│ sweep_group_name (sweep) int64 24B 1 2 9
│ sweep_fixed_angle (sweep) float64 24B 1.4 2.4 14.8
│ Attributes:
│ Conventions: None
│ instrument_name: None
│ version: None
│ title: None
│ institution: None
│ references: None
│ source: None
│ history: None
│ comment: im/exported using xradar
├── Group: /sweep_0
│ Dimensions: (azimuth: 361, range: 400)
│ Coordinates:
│ * azimuth (azimuth) float64 3kB 0.5055 1.549 2.516 ... 358.5 359.5
│ elevation (azimuth) float64 3kB ...
│ time (azimuth) datetime64[ns] 3kB 2013-05-10T00:00:25.62121...
│ * range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
│ Data variables:
│ DBZH (azimuth, range) float64 1MB ...
│ sweep_mode <U20 80B ...
│ sweep_number int64 8B ...
│ prt_mode <U7 28B ...
│ follow_mode <U7 28B ...
│ sweep_fixed_angle float64 8B ...
├── Group: /sweep_1
│ Dimensions: (azimuth: 361, range: 400)
│ Coordinates:
│ * azimuth (azimuth) float64 3kB 0.511 1.505 2.505 ... 358.5 359.5
│ elevation (azimuth) float64 3kB ...
│ time (azimuth) datetime64[ns] 3kB 2013-05-10T00:00:36.65151...
│ * range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
│ Data variables:
│ DBZH (azimuth, range) float64 1MB ...
│ sweep_mode <U20 80B ...
│ sweep_number int64 8B ...
│ prt_mode <U7 28B ...
│ follow_mode <U7 28B ...
│ sweep_fixed_angle float64 8B ...
└── Group: /sweep_2
Dimensions: (azimuth: 361, range: 400)
Coordinates:
* azimuth (azimuth) float64 3kB 0.522 1.516 2.51 ... 358.5 359.5
elevation (azimuth) float64 3kB ...
time (azimuth) datetime64[ns] 3kB 2013-05-10T00:02:14.19696...
* range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
Data variables:
DBZH (azimuth, range) float64 1MB ...
sweep_mode <U20 80B ...
sweep_number int64 8B ...
prt_mode <U7 28B ...
follow_mode <U7 28B ...
sweep_fixed_angle float64 8B ...dtree = xd.io.open_rainbow_datatree(filename, sweep=["sweep_1", "sweep_2", "sweep_8"])
display(dtree)
<xarray.DataTree>
Group: /
│ Dimensions: (sweep: 3)
│ Coordinates:
│ latitude float64 8B ...
│ longitude float64 8B ...
│ altitude float64 8B ...
│ Dimensions without coordinates: sweep
│ Data variables:
│ volume_number int64 8B 0
│ platform_type <U5 20B 'fixed'
│ instrument_type <U5 20B 'radar'
│ time_coverage_start <U20 80B '2013-05-10T00:00:19Z'
│ time_coverage_end <U20 80B '2013-05-10T00:02:05Z'
│ sweep_group_name (sweep) int64 24B 1 2 8
│ sweep_fixed_angle (sweep) float64 24B 1.4 2.4 12.2
│ Attributes:
│ Conventions: None
│ instrument_name: None
│ version: None
│ title: None
│ institution: None
│ references: None
│ source: None
│ history: None
│ comment: im/exported using xradar
├── Group: /sweep_0
│ Dimensions: (azimuth: 361, range: 400)
│ Coordinates:
│ * azimuth (azimuth) float64 3kB 0.5055 1.549 2.516 ... 358.5 359.5
│ elevation (azimuth) float64 3kB ...
│ time (azimuth) datetime64[ns] 3kB 2013-05-10T00:00:25.62121...
│ * range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
│ Data variables:
│ DBZH (azimuth, range) float64 1MB ...
│ sweep_mode <U20 80B ...
│ sweep_number int64 8B ...
│ prt_mode <U7 28B ...
│ follow_mode <U7 28B ...
│ sweep_fixed_angle float64 8B ...
├── Group: /sweep_1
│ Dimensions: (azimuth: 361, range: 400)
│ Coordinates:
│ * azimuth (azimuth) float64 3kB 0.511 1.505 2.505 ... 358.5 359.5
│ elevation (azimuth) float64 3kB ...
│ time (azimuth) datetime64[ns] 3kB 2013-05-10T00:00:36.65151...
│ * range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
│ Data variables:
│ DBZH (azimuth, range) float64 1MB ...
│ sweep_mode <U20 80B ...
│ sweep_number int64 8B ...
│ prt_mode <U7 28B ...
│ follow_mode <U7 28B ...
│ sweep_fixed_angle float64 8B ...
└── Group: /sweep_2
Dimensions: (azimuth: 361, range: 400)
Coordinates:
* azimuth (azimuth) float64 3kB 0.5 1.544 2.51 ... 358.5 359.5
elevation (azimuth) float64 3kB ...
time (azimuth) datetime64[ns] 3kB 2013-05-10T00:02:03.10606...
* range (range) float32 2kB 125.0 375.0 ... 9.962e+04 9.988e+04
Data variables:
DBZH (azimuth, range) float64 1MB ...
sweep_mode <U20 80B ...
sweep_number int64 8B ...
prt_mode <U7 28B ...
follow_mode <U7 28B ...
sweep_fixed_angle float64 8B ...